Part 8: Complete flow
Usually, field shapes are not saved in code as a F2CField in a local system,
but as a file in a custom Coordinate Reference System (CRS).
Working with them in Fields2Cover is also possible.
For this tutorial, we will assume that the variable DATA_PATH exists and contains the direction to the data folder.
Import a field
To import a field from a xml file, we can do:
F2CField field = f2c::Parser::importFieldGml(std::string(DATA_PATH) + "test1.xml");
field = f2c.Parser().importFieldGml(DATA_PATH + "test1.xml");
F2CField constructor splits the data of the boundary of the field between a F2CPoint used as a reference point and a F2CCells with the boundaries in a local space (First point of it is (0, 0)). To obtain the field shape in absolute values, we have the function getCellsAbsPosition().
Transform to UTM
In our case, the file “test1.xml” contains data in EPSG:4258 (European version of GPS). Unfortunately, values are not in a metric system, and the difference between two points are not in meters either. Therefore, working with it is quite difficult.
Luckily, to solve this we can transform this data in its custom CRS into UTM.
f2c::Transform::transformToUTM(field);
f2c.Transform.transformToUTM(field);
This is the only line we need to convert our data to UTM!
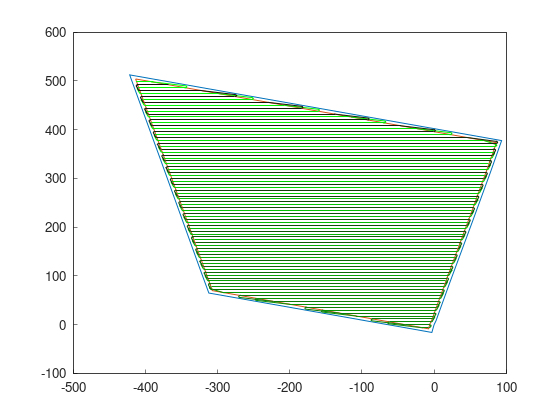
Create path
Once we have the field in UTM, let’s create a coverage path, as we did it in previous tutorials:
F2CRobot robot (2.0, 6.0);
robot.setMinRadius(2); // m
f2c::hg::ConstHL const_hl;
F2CCells no_hl = const_hl.generateHeadlands(field.getField(), 3.0 * robot.getWidth());
f2c::sg::BruteForce bf;
F2CSwaths swaths = bf.generateSwaths(M_PI, robot.getCovWidth(), no_hl.getGeometry(0));
f2c::rp::SnakeOrder snake_sorter;
swaths = snake_sorter.genSortedSwaths(swaths);
f2c::pp::PathPlanning path_planner;
f2c::pp::DubinsCurves dubins;
F2CPath path = path_planner.planPath(robot, swaths, dubins);
robot = f2c.Robot(2.0, 6.0);
robot.setMinRadius(2);
const_hl = f2c.HG_Const_gen()
no_hl = const_hl.generateHeadlands(field.getField(), 3.0 * robot.getWidth())
bf = f2c.SG_BruteForce()
swaths = bf.generateSwaths(math.pi, robot.getCovWidth(), no_hl.getGeometry(0))
snake_sorter = f2c.RP_Snake()
swaths = snake_sorter.genSortedSwaths(swaths)
path_planner = f2c.PP_PathPlanning()
dubins = f2c.PP_DubinsCurves()
path = path_planner.planPath(robot, swaths, dubins);
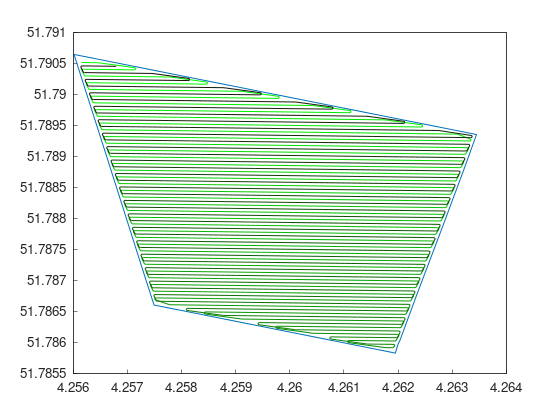
Move the path back to previous CRS
Our coverage path is now generated in a local system, so we cannot use it like this. To transform the path to the original CRS of the data:
F2CPath path_gps = f2c::Transform::transformToPrevCRS(path, field);
path_gps = f2c.Transform.transformToPrevCRS(path, field);
Finally, save the path to a file as:
path_gps.saveToFile("path.csv");
path_gps.saveToFile("path.csv");