Part 5: Route planning
A route planner searches the best order to cover previously generated swaths. We can do this process using metaheuristics or known patterns. Let’s first explain the metaheuristic approach.
Metaheuristics for route planning
For this tutorial, let’s use this field:
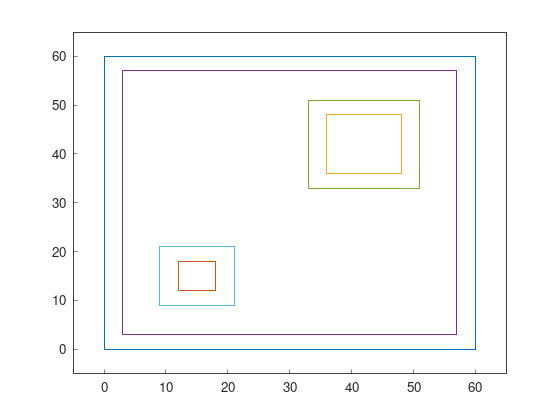
This method searches the shortest route to cover all the swaths. Our inputs are: 1. the swaths; 2. The path to traverse through the headlands.
Swaths were already generated using the Swath generator module. On the other hand, the path on the headland has not been computed yet. As we usually use 3 widths of the robot as the headland width, we create a headland path that navigates using the middle of the headland:
f2c::hg::ConstHL const_hl;
F2CCells mid_hl = const_hl.generateHeadlands(cells, 1.5 * robot.getWidth());
F2CCells no_hl = const_hl.generateHeadlands(cells, 3.0 * robot.getWidth());
f2c::sg::BruteForce bf;
F2CSwathsByCells swaths = bf.generateSwaths(M_PI/2.0, robot.getCovWidth(), no_hl);
const_hl = f2c.HG_Const_gen();
mid_hl = const_hl.generateHeadlands(cells, 1.5 * robot.getWidth());
no_hl = const_hl.generateHeadlands(cells, 3.0 * robot.getWidth());
bf = f2c.SG_BruteForce();
swaths = bf.generateSwaths(math.pi/2.0, robot.getCovWidth(), no_hl);
For it, we rely on OR-tools to do the optimization process. The route is then computed as:
f2c::rp::RoutePlannerBase route_planner;
F2CRoute route = route_planner.genRoute(mid_hl, swaths);
route_planner = f2c.RP_RoutePlannerBase();
route = route_planner.genRoute(mid_hl, swaths);
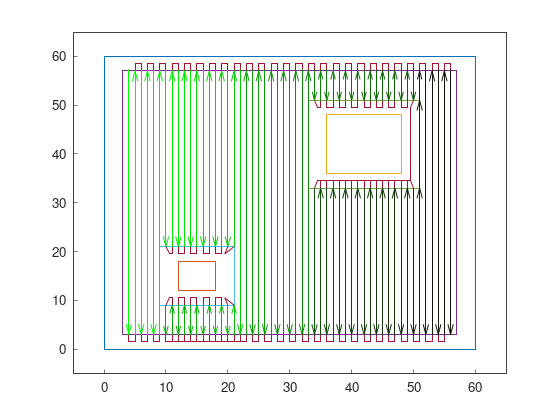
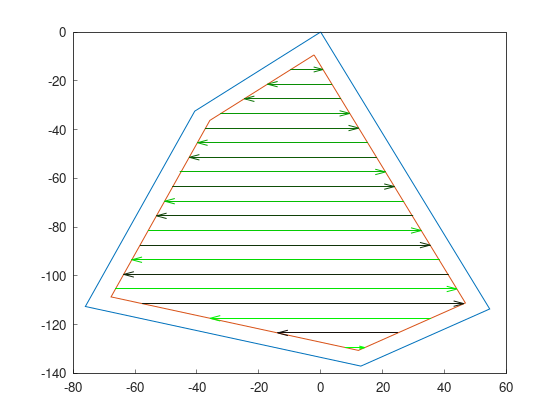
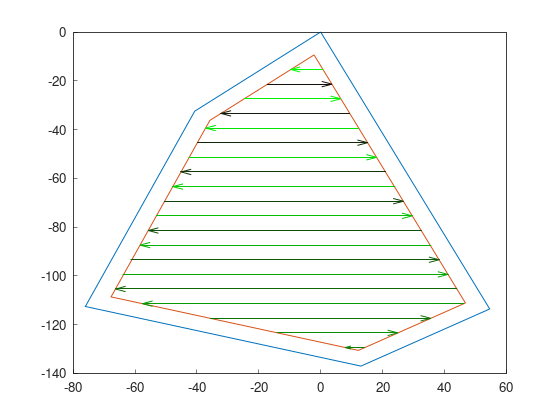
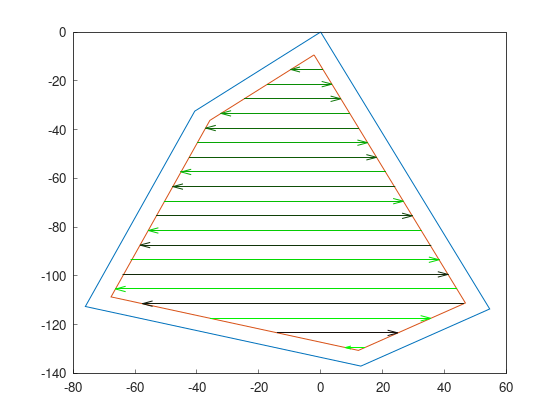
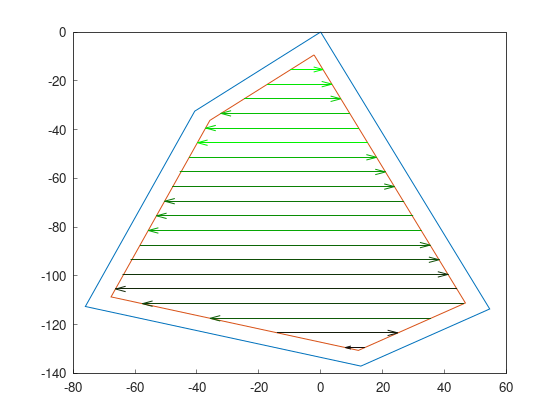
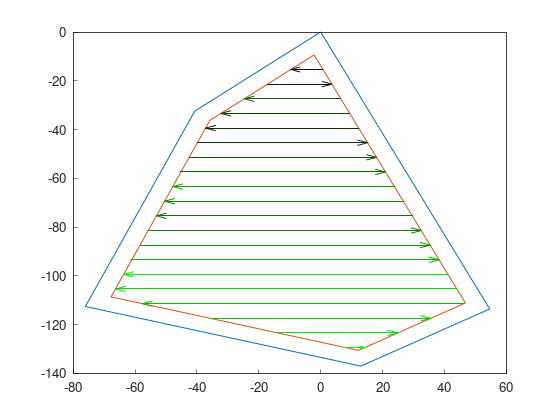
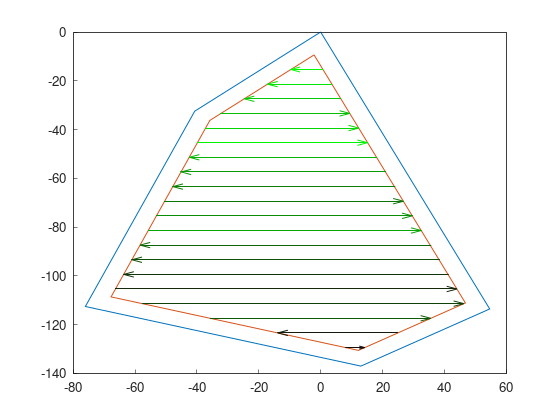
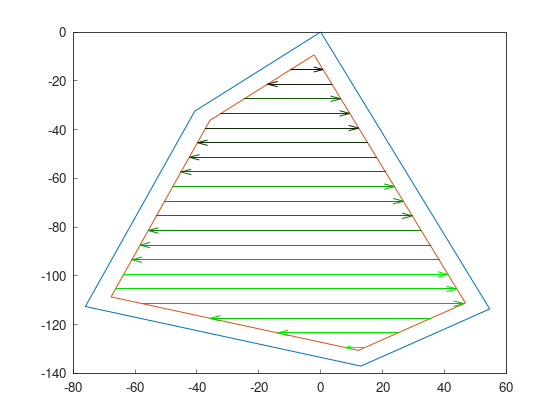
To plot the order, we have used green for earlier covered swaths and black for last covered. The direction of swaths is also green dot to black cross.
Finally, we can use the function f2c::rp::RoutePlannerBase::setStartAndEndPoint(const F2CPoint& p) to set the start and end point of the route.
If this function is not used, the route will start at the start of the first swath and will end at the end of the last swath.
Known patterns
On the other hand, for swaths that have been created in order (in convex fields), can be sorted faster using known patterns.
For these examples, we will continue from the previous tutorial:
f2c::Random rand(42);
F2CRobot robot (2.0, 6.0);
f2c::hg::ConstHL const_hl;
F2CCells cells = rand.generateRandField(1e4, 5).getField();
F2CCells no_hl = const_hl.generateHeadlands(cells, 3.0 * robot.getWidth());
f2c::sg::BruteForce bf;
F2CSwaths swaths = bf.generateSwaths(M_PI, robot.getCovWidth(), no_hl.getGeometry(0));
rand = f2c.Random(42);
robot = f2c.Robot(2.0, 6.0);
const_hl = f2c.HG_Const_gen();
field = rand.generateRandField(1e4, 5);
cells = field.getField();
no_hl = const_hl.generateHeadlands(cells, 3.0 * robot.getWidth());
bf = f2c.SG_BruteForce();
swaths = bf.generateSwaths(math.pi, robot.getCovWidth(), no_hl.getGeometry(0));
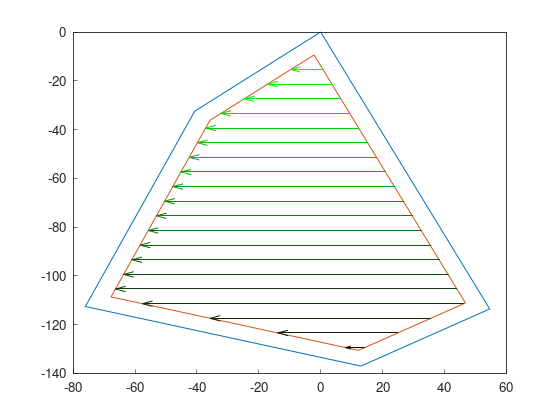
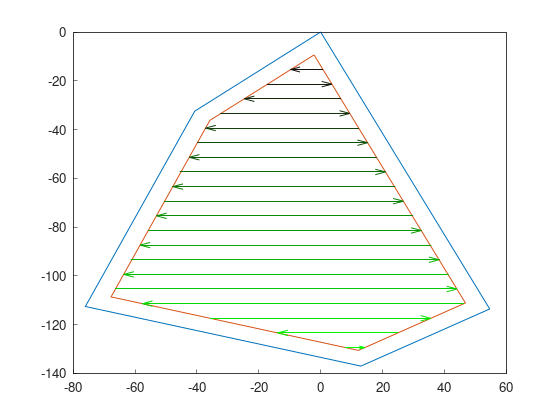
Boustrophedon order
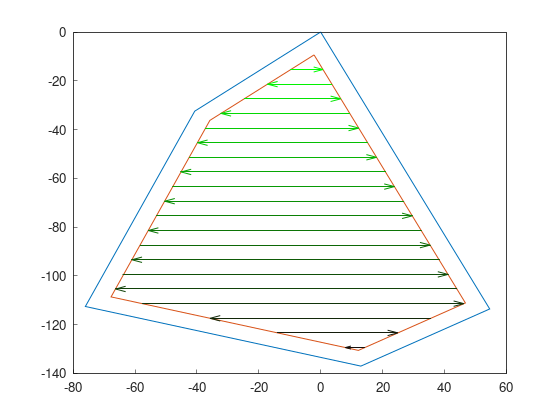
Boustrophedon pattern is one of the most known patterns to cover a field. Swaths are traveled in the simplest order, covering first the first swath, then the second, and so on. This pattern can have 4 results on the same field, depending on the start point.
With the next code, swaths are order as the first image.
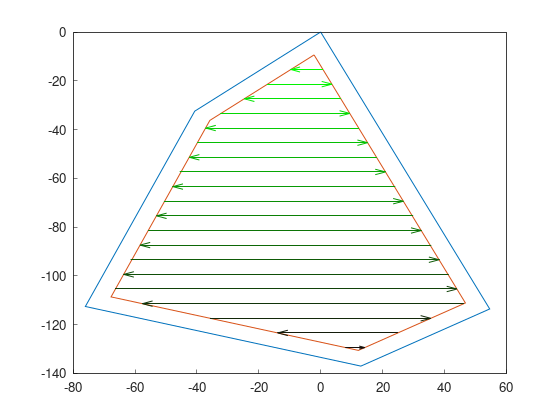
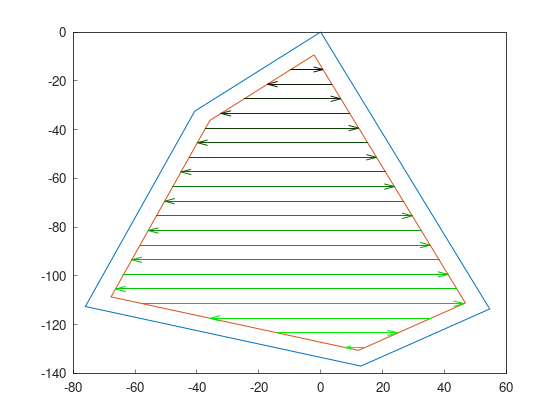
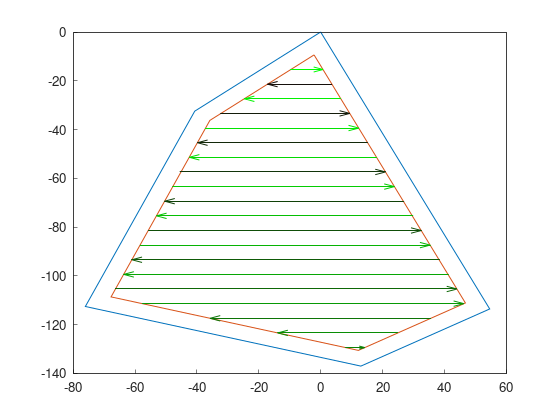
Calling again genSortedSwaths produces the other variants.
Once it has been called 4 times, the loop starts over.
f2c::rp::BoustrophedonOrder boustrophedon_sorter;
boustrophedon_swaths = boustrophedon_sorter.genSortedSwaths(swaths);
boustrophedon_sorter = f2c.RP_Boustrophedon();
swaths = boustrophedon_sorter.genSortedSwaths(swaths);
|
|
|
|
Snake order
Snake order covers the field skipping one swath each turn, and then coming back using uncovered swaths. This pattern, compared to boustrophedon, reduces the number of sharp turns.
As with boustrophedon pattern, snake pattern also has 4 variants:
f2c::rp::SnakeOrder snake_sorter;
snake_swaths = snake_sorter.genSortedSwaths(swaths);
snake_sorter = f2c.RP_Snake();
swaths = snake_sorter.genSortedSwaths(swaths);
|
|
|
|
Spiral order
Spiral order covers the field in multiple spirals with predefined size. This pattern is commonly used when harvesting. Harvesters have a limited capacity and sometimes have to unload onto a truck.
Because the side to which they can unload is usually fixed (either left, or right), it is best to minimize the number of occasions, of the truck having to drive into the unharvested part of the field, or the harvester making way for the truck and waiting until it is unloaded.
With this order, there is always only one swath in entire spiral, where this event can occur.
The higher the spiral size, the lower the chance of having to unload onto an unharvested path of the field, at the price of longer distance travelled between the swaths.
With the spiral size of 6, the order of swaths travelled is: 1, 6, 2, 5, 3, 4, 7, 12, 8, 11 and so on…
Same as previous patterns, spiral pattern also has 4 variants:
f2c::rp::SpiralOrder spiral_sorter(6);
spiral_swaths = spiral_sorter.genSortedSwaths(swaths);
spiral_sorter = f2c.RP_Spiral(6);
swaths = spiral_sorter.genSortedSwaths(swaths);
|
|
|
|
Custom order
To support more general approach for coverage path planning it’s possible to define custom order of the swaths for the path planning process.
f2c::rp::CustomOrder custom_order({0, 1, 2, 3, 4});
custom_swaths = custom_order.genSortedSwaths(swaths);
custom_order = f2c.RP_CustomOrder([0, 1, 2, 3, 4])
swaths = custom_order.genSortedSwaths(swaths)
Note
There are several checks whether the customer order can be used or not.
The custom order may not contain any elements more than once
The supplied list/vector length must be the same as the number of the swaths
The order vector may contain only elements from the swath range: <0, swaths.size() - 1>